
I am a Senior Software Engineer, Tech Lead, and Researcher at NVIDIA. Previously, I was a Research Scientist at the Robotics and AI Institute (formerly the Boston Dynamics AI Institute).
My research focuses on enabling robots to interact with the physical world with dexterity, intelligence, and robustness.
I earned my Ph.D. from the University of California, Berkeley, where I was advised by Prof. Masayoshi Tomizuka, a distinguished member of the National Academy of Engineering.
Email: xinghaoz [at] nvidia [dot] com
News
- 2025/10 • We released a demo for dynamic whole-body manipulation with sampling and learning.
- 2025/08 • Our ReLIC was accepted by CoRL 2025 as Oral.
- 2025/05 • We are organizing the WBCD challenge at ICRA 2025.
- 2025/05 • One paper accepted by ICRA 2025.
- 2025/05 • Two papers accepted by IROS 2025.
- 2024/08 • My work on versatile loco-manipulation was featured in Marc Raibert’s keynote at WRC 2024.
- 2024/05 • Two papers accepted by IROS 2024.
- 2024/05 • Our Open X-Embodiment project received Best Paper Award at ICRA 2024.
- 2024/05 • Four papers accepted by ICRA 2024.
- 2024/05 • One paper accepted by RSS 2024.
- 2024/03 • I joined The Robotics and AI Institute as a research scientist.
- 2023/12 • Our LLM-POP received Honorable Mention at the Instruction Workshop at NeurIPS 2023.
- 2023/09 • Our Diff-LfD was accepted by CoRL 2023 as Oral.
Publications
 Combining Sampling and Learning for Dynamic Whole-Body Manipulation
Combining Sampling and Learning for Dynamic Whole-Body Manipulation
RAI team, Xinghao Zhu
Demo
Blogpost
•
X
•
LinkedIn
•
Youtube
 Versatile Loco-Manipulation through Flexible Interlimb Coordination
Versatile Loco-Manipulation through Flexible Interlimb Coordination
Xinghao Zhu, Yuxin Chen, Lingfeng Sun, Farzad Niroui, Simon Le Cleac'h, Jiuguang Wang, Kuan Fang
CoRL 2025 • Oral Presentation
Webpage
•
Paper
•
Blogpost
•
X
•
Thread
 Adaptive energy regularization for autonomous gait transition and energy-efficient quadruped locomotion
Adaptive energy regularization for autonomous gait transition and energy-efficient quadruped locomotion
Xinghao Zhu, Boyuan Liang, Lingfeng Sun, Bike Zhang, Ziyin Xiong, Yixiao Wang, Chenran Li, Koushil Sreenath, Masayoshi Tomizuka
ICRA 2025
•
Webpage
•
Paper
 Planning-Guided Diffusion Policy Learning for Generalizable Contact-Rich Bimanual Manipulation
Planning-Guided Diffusion Policy Learning for Generalizable Contact-Rich Bimanual Manipulation
Xuanlin Li, Tong Zhao, Xinghao Zhu, Jiuguang Wang, Tao Pang, Kuan Fang
arXiv Preprint
Webpage
•
Paper
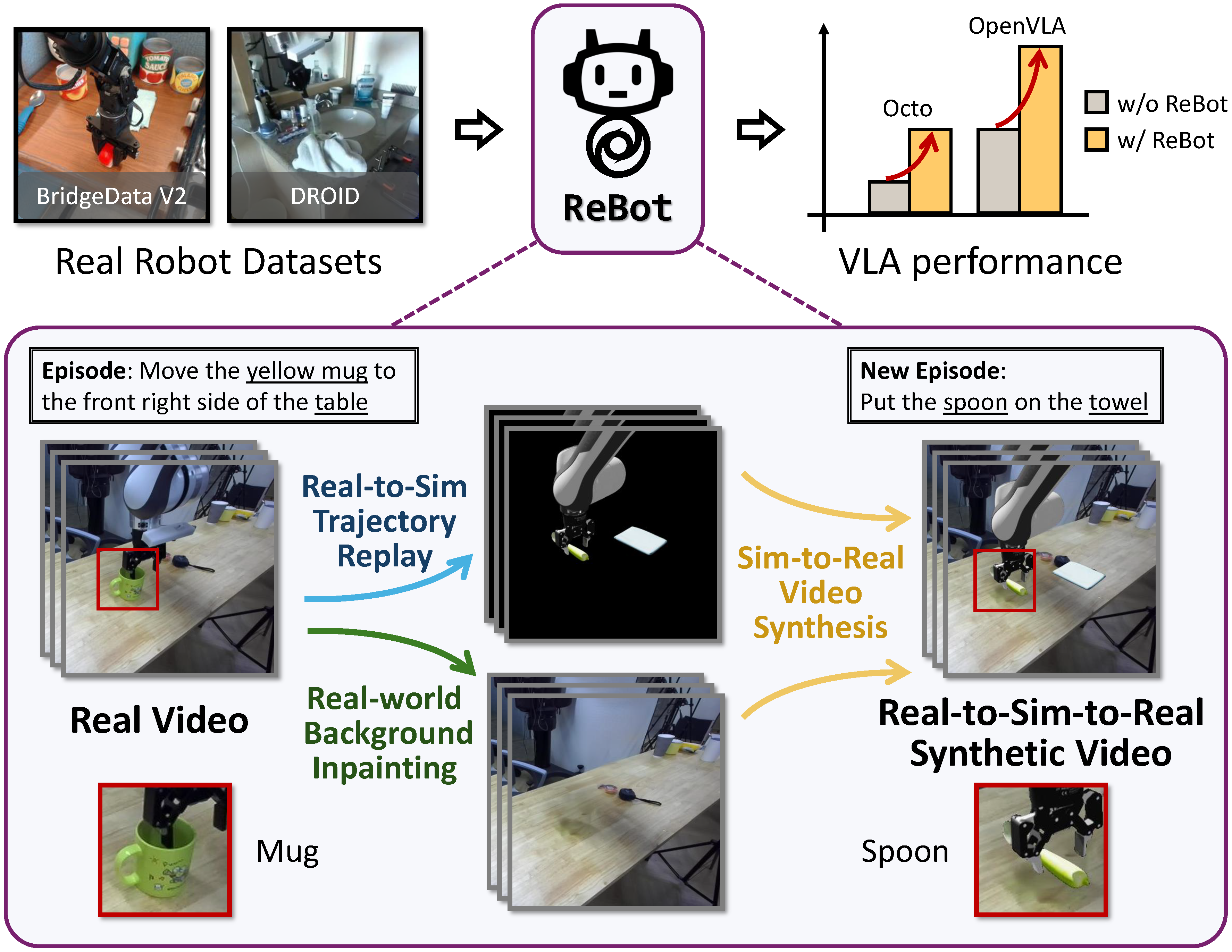 ReBot: Scaling Robot Learning with Real-to-Sim-to-Real Robotic Video Synthesis
ReBot: Scaling Robot Learning with Real-to-Sim-to-Real Robotic Video Synthesis
Yu Fang, Yue Yang, Xinghao Zhu, Kaiyuan Zheng, Gedas Bertasius, Daniel Szafir, Mingyu Ding
IROS 2025
Webpage
•
Paper
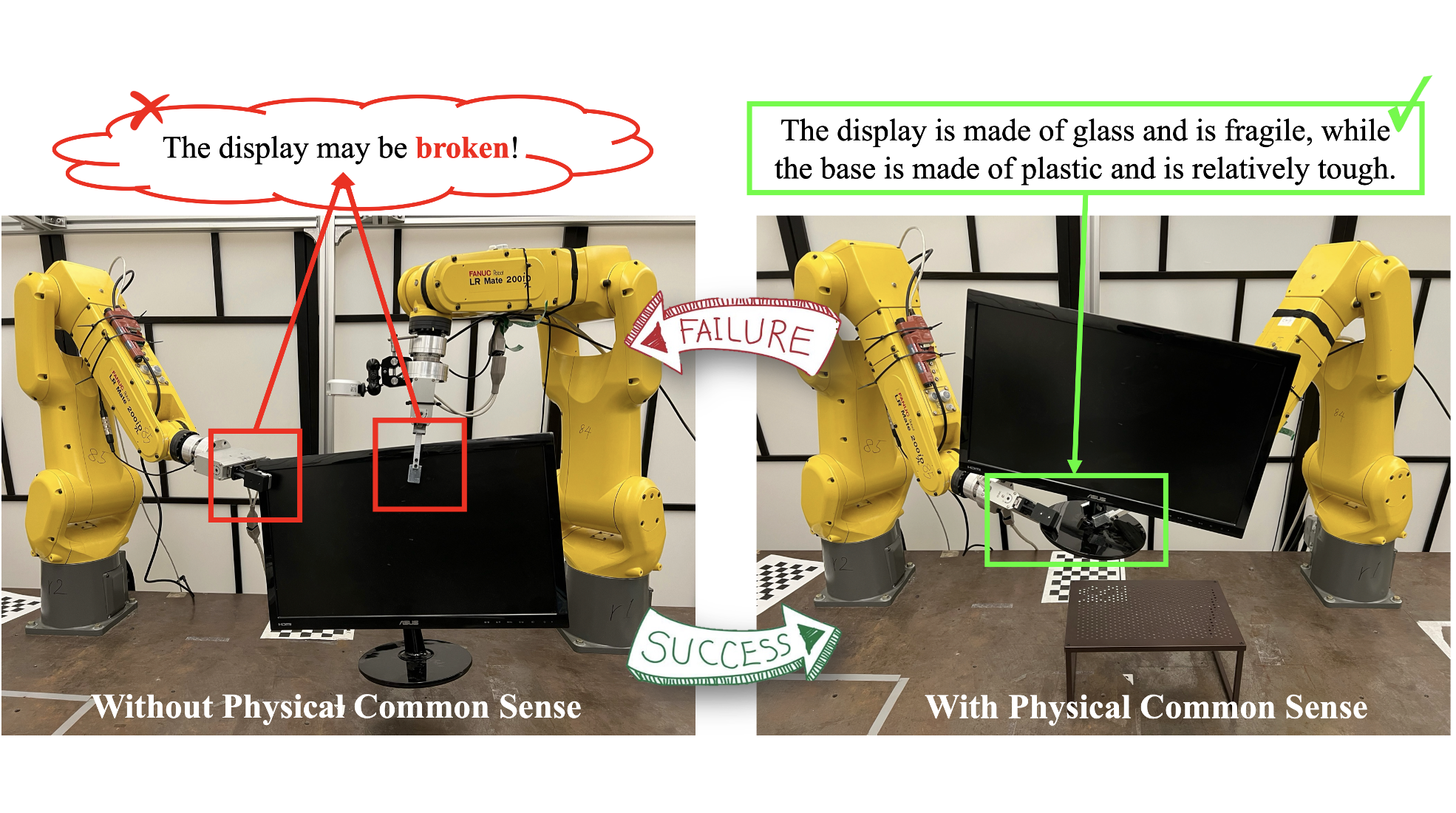 PhyGrasp: Generalizing Robotic Grasping with Physics-informed Large Multimodal Models
PhyGrasp: Generalizing Robotic Grasping with Physics-informed Large Multimodal Models
Dingkun Guo, Yuqi Xiang, Shuqi Zhao, Xinghao Zhu, Masayoshi Tomizuka, Mingyu Ding, Wei Zhan
IROS 2025
•
Webpage
•
Paper
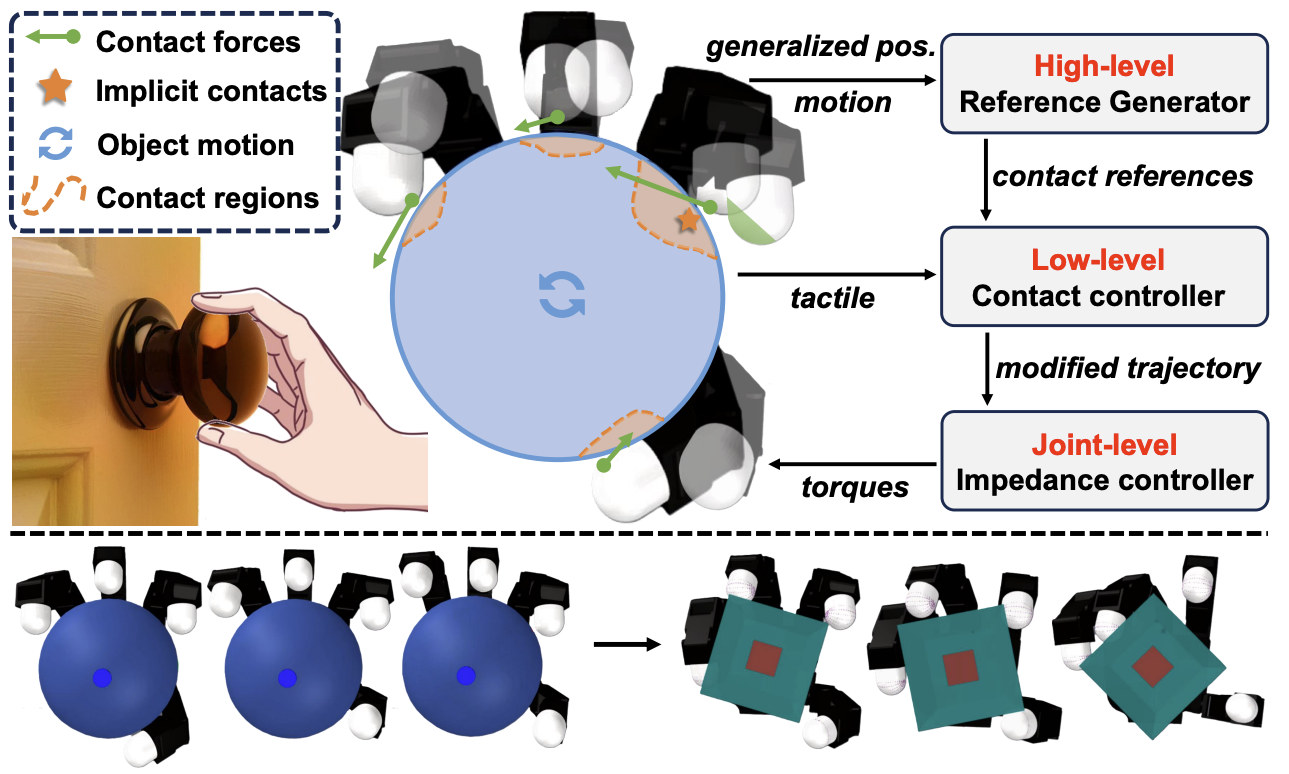 Contact-Implicit Model Predictive Control for Dexterous In-hand Manipulation
Contact-Implicit Model Predictive Control for Dexterous In-hand Manipulation
Yongpeng Jiang, Mingrui Yu, Xinghao Zhu, Masayoshi Tomizuka, Xiang Li
IROS 2024
Paper
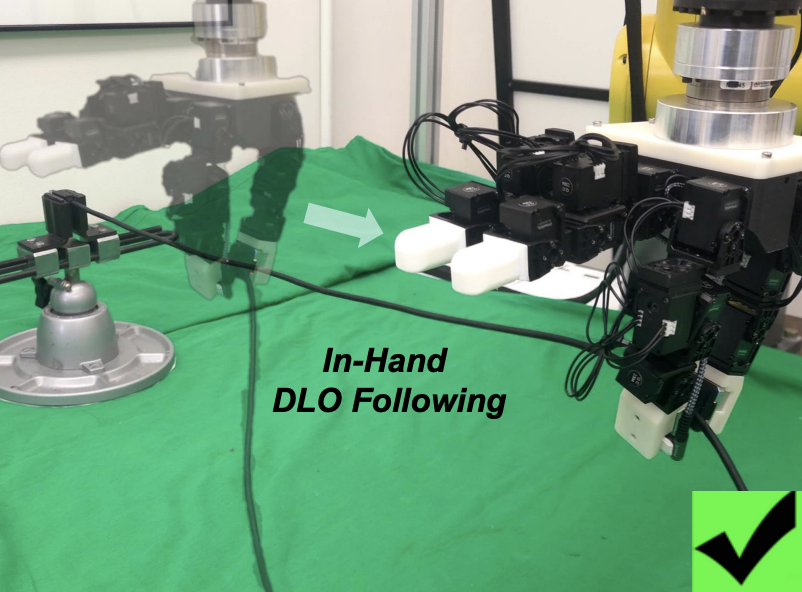 In-Hand Following of Deformable Linear Objects using Dexterous Fingers with Tactile Sensing
In-Hand Following of Deformable Linear Objects using Dexterous Fingers with Tactile Sensing
Mingrui Yu, Boyuan Liang, Xiang Zhang, Xinghao Zhu, Lingfeng Sun, Changhao Wang, Shiji Song, Xiang Li, Masayoshi Tomizuka
IROS 2024
Paper
 Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Open X-Embodiment Collaboration
ICRA 2024 • Best Paper Award
Webpage
•
Paper
•
Code
•
Dataset
•
Blogpost
 Multi-level Reasoning for Robotic Assembly: From Sequence Inference to Contact Selection
Multi-level Reasoning for Robotic Assembly: From Sequence Inference to Contact Selection
Xinghao Zhu, Devesh K. Jha, Diego Romeres, Lingfeng Sun, Masayoshi Tomizuka, Anoop Cherian
ICRA 2024
Paper
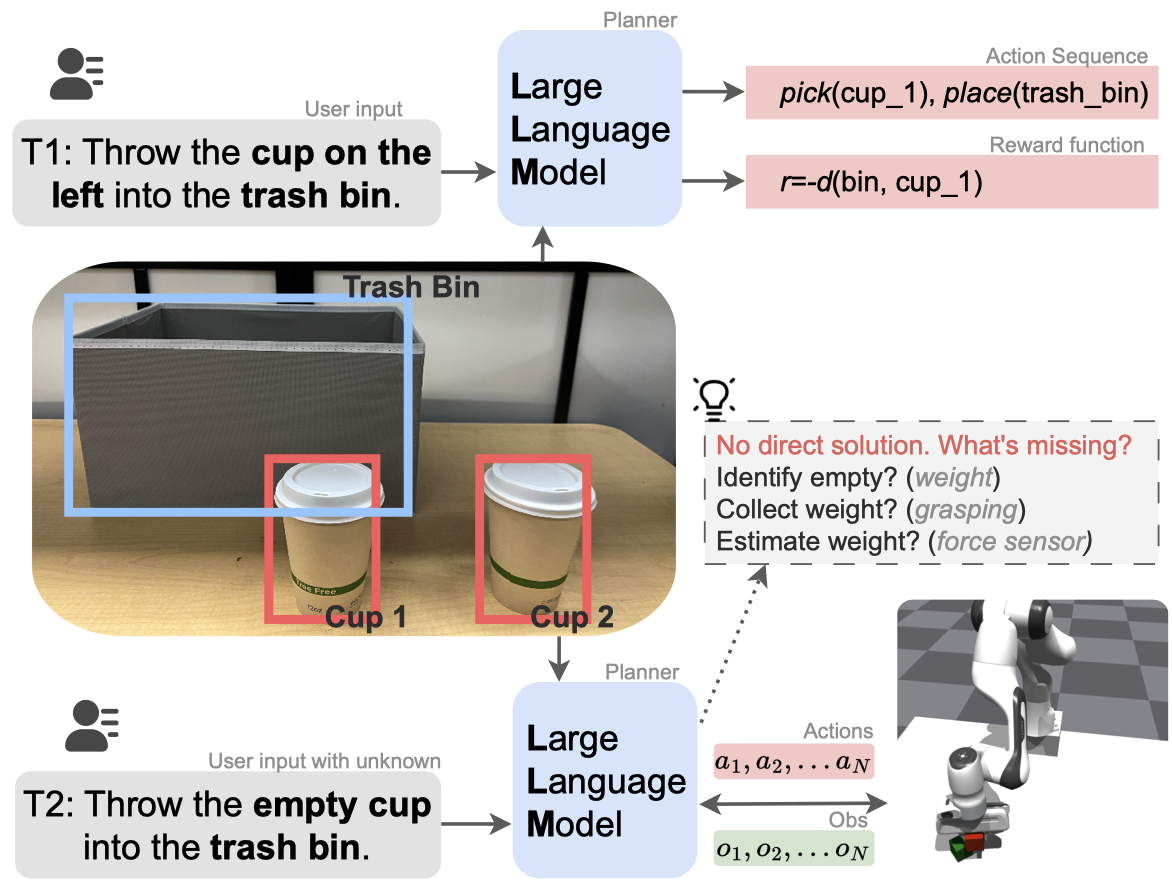 LLM-POP: Large Language Model for Partially Observable Task Planning
LLM-POP: Large Language Model for Partially Observable Task Planning
Lingfeng Sun, Devesh K. Jha, Chiori Hori, Siddarth Jain, Radu Corcodel, Xinghao Zhu, Masayoshi Tomizuka, Diego Romeres
Instruction Workshop, NeurIPS 2023 • Honorable Mention
ICRA 2024
Paper
 Human-oriented Representation Learning for Robotic Manipulation
Human-oriented Representation Learning for Robotic Manipulation
Mingxiao Huo, Mingyu Ding, Chenfeng Xu, Thomas Tian, Xinghao Zhu, Yao Mu, Lingfeng Sun, Masayoshi Tomizuka, Wei Zhan
RSS 2024
Webpage
•
Dataset
•
Paper
 Diff-LfD: Contact-aware Model-based Learning from Visual Demonstration for Robotic Manipulation via Differentiable Physics-based Simulation and Rendering
Diff-LfD: Contact-aware Model-based Learning from Visual Demonstration for Robotic Manipulation via Differentiable Physics-based Simulation and Rendering
Xinghao Zhu, Jinghan Ke, Zhixuan Xu, Zhixin Sun, Bizhe Bai, Jun Lv, Qingtao Liu, Yuwei Zeng, Qi Ye, Cewu Lu, Masayoshi Tomizuka, Lin Shao
CoRL 2023 • Oral Presentation
Webpage
•
Paper
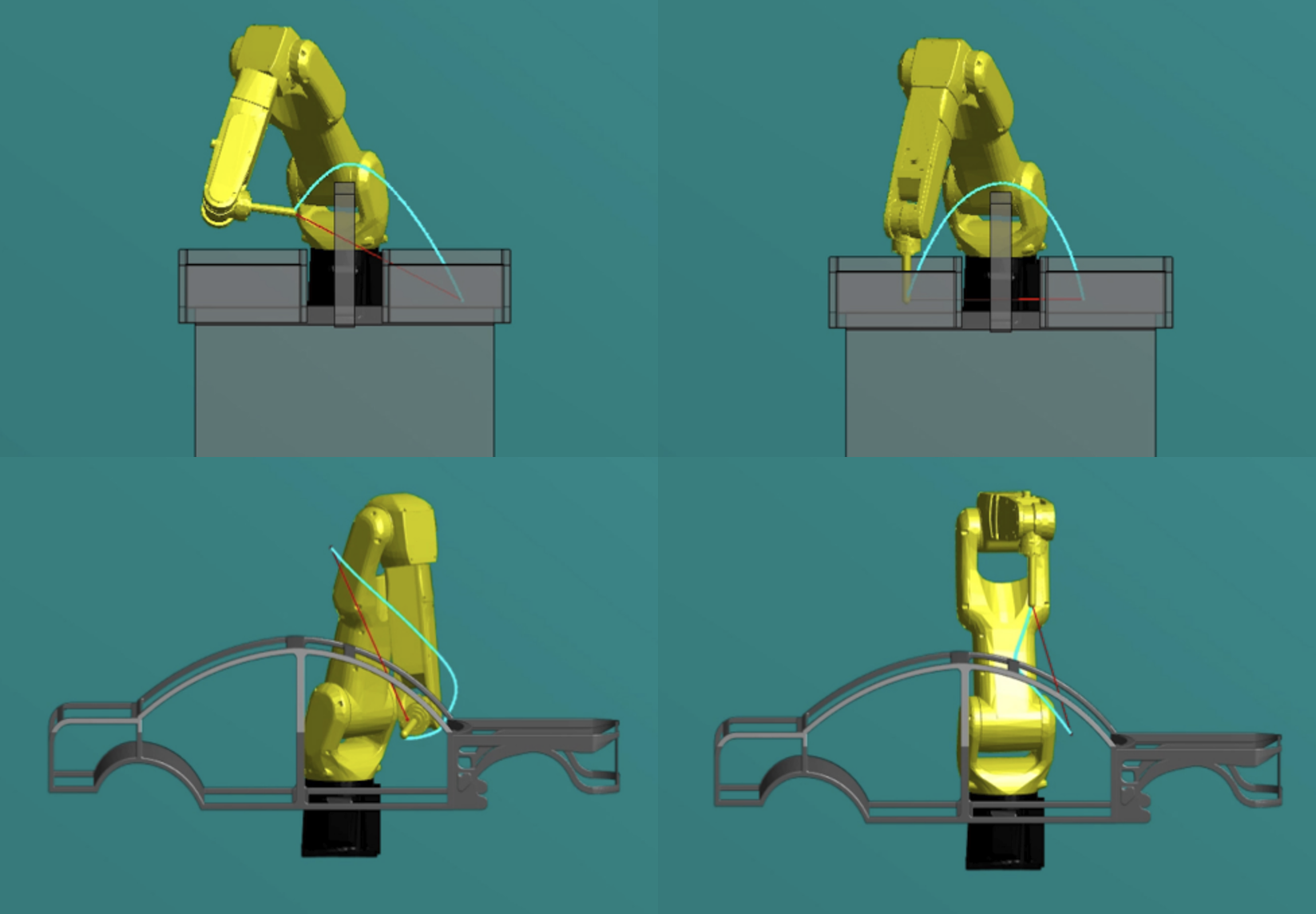
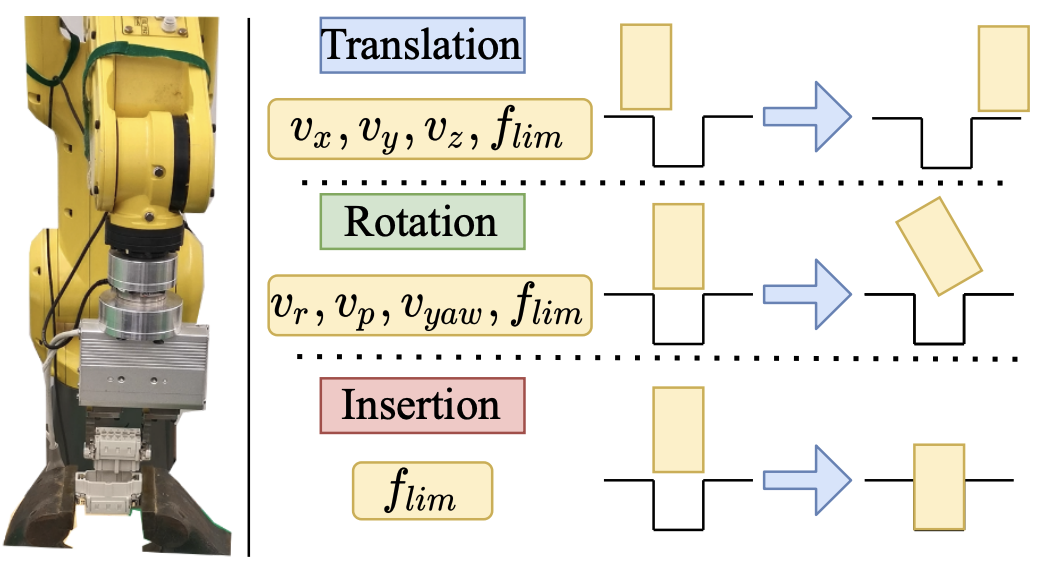
 Efficient Sim-to-real Transfer of Contact-Rich Manipulation Skills with Online Admittance Residual Learning
Efficient Sim-to-real Transfer of Contact-Rich Manipulation Skills with Online Admittance Residual Learning
Xiang Zhang, Changhao Wang, Lingfeng Sun, Zheng Wu, Xinghao Zhu, Masayoshi Tomizuka
CoRL 2023
Webpage
•
Paper
 Control of Soft Pneumatic Actuators with Approximated Dynamical Modeling
Control of Soft Pneumatic Actuators with Approximated Dynamical Modeling
Wu-Te Yang, Burak Kürkçü, Motohiro Hirao, Lingfeng Sun, Xinghao Zhu, Zhizhou Zhang, Grace X. Gu, Masayoshi Tomizuka
ROBIO 2023
Paper
 Allowing Safe Contact in Robotic Goal-Reaching: Planning and Tracking in Operational and Null Spaces
Allowing Safe Contact in Robotic Goal-Reaching: Planning and Tracking in Operational and Null Spaces
Xinghao Zhu, Wenzhao Lian, Bodi Yuan, C. Daniel Freeman, Masayoshi Tomizuka
ICRA 2023
Video
•
Code
•
Paper
 Learn to Grasp with Less Supervision: A Data-Efficient Maximum Likelihood Grasp Sampling Loss
Learn to Grasp with Less Supervision: A Data-Efficient Maximum Likelihood Grasp Sampling Loss
Xinghao Zhu, Yefan Zhou, Yongxiang Fan, Lingfeng Sun, Jianyu Chen, Masayoshi Tomizuka
ICRA 2022
Video
•
Paper
 Learning to Synthesize Volumetric Meshes from Vision-based Tactile Imprints
Learning to Synthesize Volumetric Meshes from Vision-based Tactile Imprints
Xinghao Zhu, Siddarth Jain, Masayoshi Tomizuka, Jeroen Van Baar
ICRA 2022
Paper
 BPOMP: A Bilevel Path Optimization Formulation for Motion Planning
BPOMP: A Bilevel Path Optimization Formulation for Motion Planning
Changhao Wang, Hsien-Chung Lin, Shiyu Jin, Xinghao Zhu, Liting Sun, Masayoshi Tomizuka
American Control Conference (ACC) 2022
Webpage
•
Paper
 Learning Insertion Primitives with Hybrid Action Space for Robotic Assembly Tasks
Learning Insertion Primitives with Hybrid Action Space for Robotic Assembly Tasks
Xiang Zhang, Shiyu Jin, Changhao Wang, Xinghao Zhu, Masayoshi Tomizuka
ICRA 2022
Webpage
•
Paper
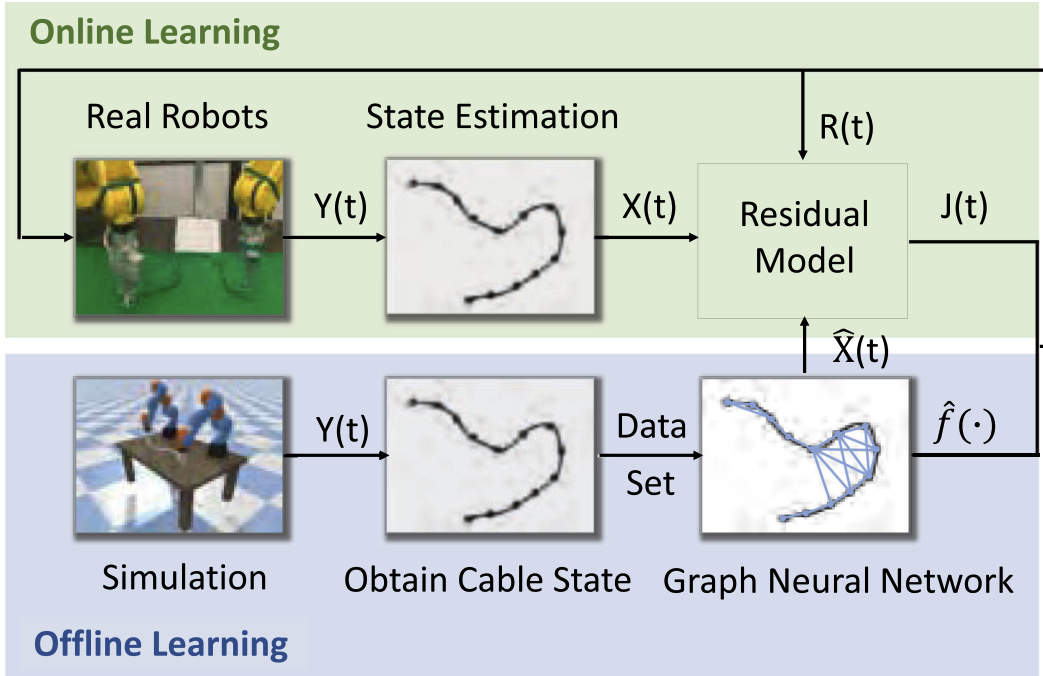 Offline-Online Learning of Deformation Model for Cable Manipulation With Graph Networks
Offline-Online Learning of Deformation Model for Cable Manipulation With Graph Networks
Changhao Wang, Yuyou Zhang, Xiang Zhang, Zheng Wu, Xinghao Zhu, Shiyu Jin, Te Tang, Masayoshi Tomizuka
RAL
Paper
 6-DoF Contrastive Grasp Proposal Network
6-DoF Contrastive Grasp Proposal Network
Xinghao Zhu, Lingfeng Sun, Yongxiang Fan, Masayoshi Tomizuka
ICRA 2021
Video
•
Paper
 Contact Pose Identification for Peg-in-Hole Assembly Under Uncertainties
Contact Pose Identification for Peg-in-Hole Assembly Under Uncertainties
Shiyu Jin, Xinghao Zhu, Changhao Wang, Masayoshi Tomizuka
ACC 2021
Paper
 Optimization Model for Planning Precision Grasps with Multi-Fingered Hands
Optimization Model for Planning Precision Grasps with Multi-Fingered Hands
Yongxiang Fan, Xinghao Zhu, Masayoshi Tomizuka
IROS 2019
Webpage
•
Paper
Academic Service
- Conference Reviewer for RSS, CoRL, ICRA, IROS, ROBIO, ICLR
- Journal Reviewer for IJRR, TRO, RA-L, TCDS
- Associate Editor for IROS 2025
Teaching
- Graduate Student Instructor, ME 233 Advanced Control Systems II, UC Berkeley, Spring 2024